Использование QGroundControl через Wi-Fi
Возможен контроль, управление и настройка полетного контроллера квадрокоптера с помощью программы QGroundControl по Wi-Fi. Для этого необходимо подключиться к Wi-Fi сети CLEVER-xxxx.
TCP-бридж
Необходимо убедиться с в launch-файле Клевера (~/catkin_ws/src/clever/clever/launch/clever.launch) включен TCP GCS Bridge:
<arg name="gcs_bridge" default="tcp"/>
При изменени launch-файла необходимо перезагрузить сервис clever:
sudo systemctl restart clever
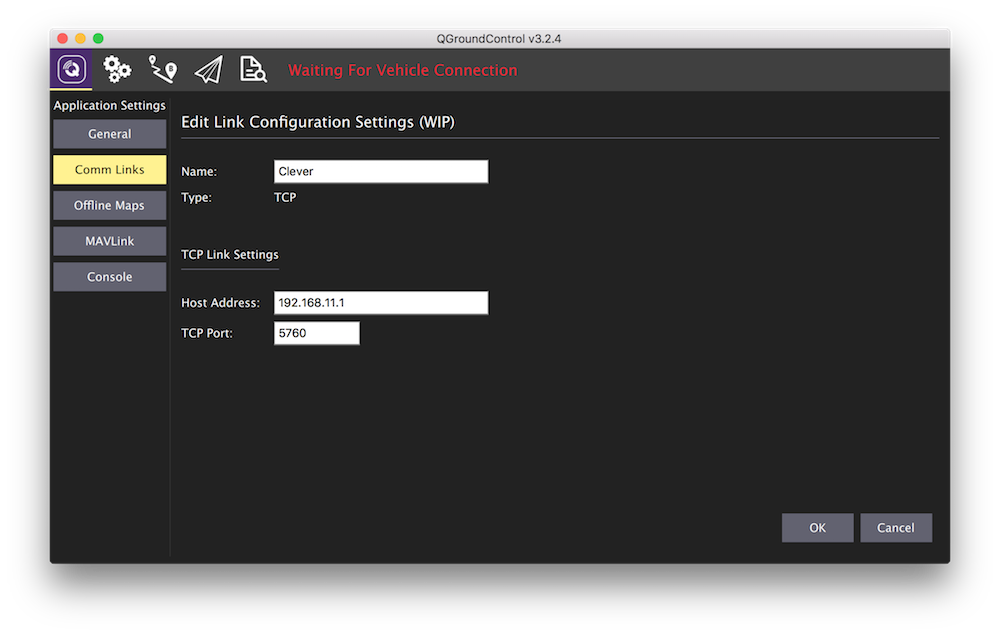
Затем в программе QGroundControl нужно выбрать Application Settings -> Comm Links -> Add. Создать подключение со следующими настройками:
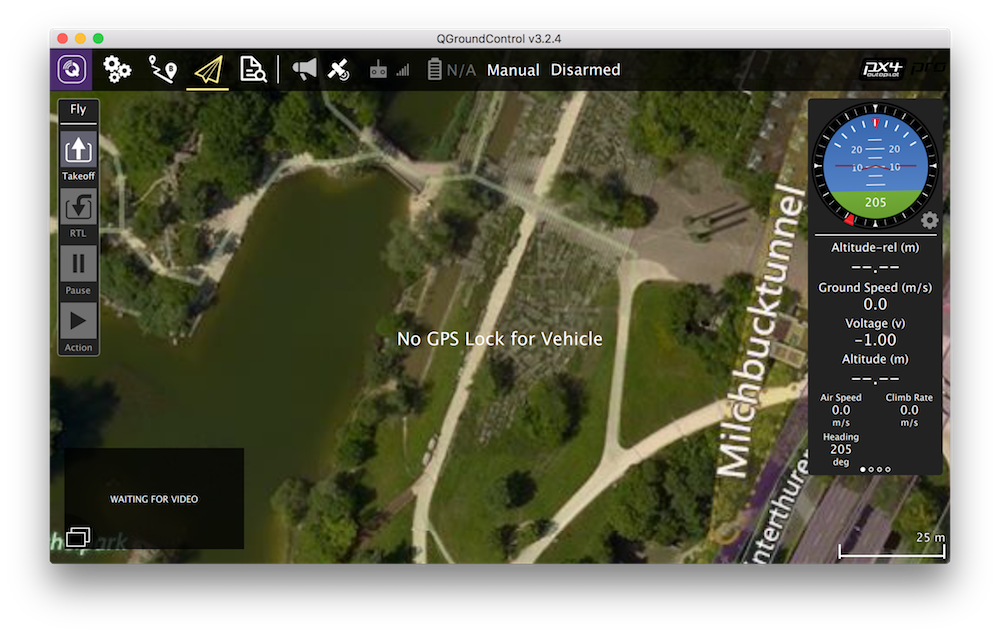
Затем необходимо выбрать в списке подключений "Clever" и нажать "Connect". После этого можно будет настраивать, калибровать и просматривать состояние квадкоптера без проводов:
UDP-бридж
TODO