Урок №13 «Управление полётом мультикоптера. Принцип функционирования полётного контроллера. ПИД регуляторы»
Управление полётом мультикоптера.
Отличие мультикоптера от других подобных роботов (ездящих, плавающих), заключается в том, что пилот не управляет напрямую мощностью мотора. С помощью джойстика, он передает сигнал полётному контроллеру, который делает расчеты и передает необходимую мощность на моторы.
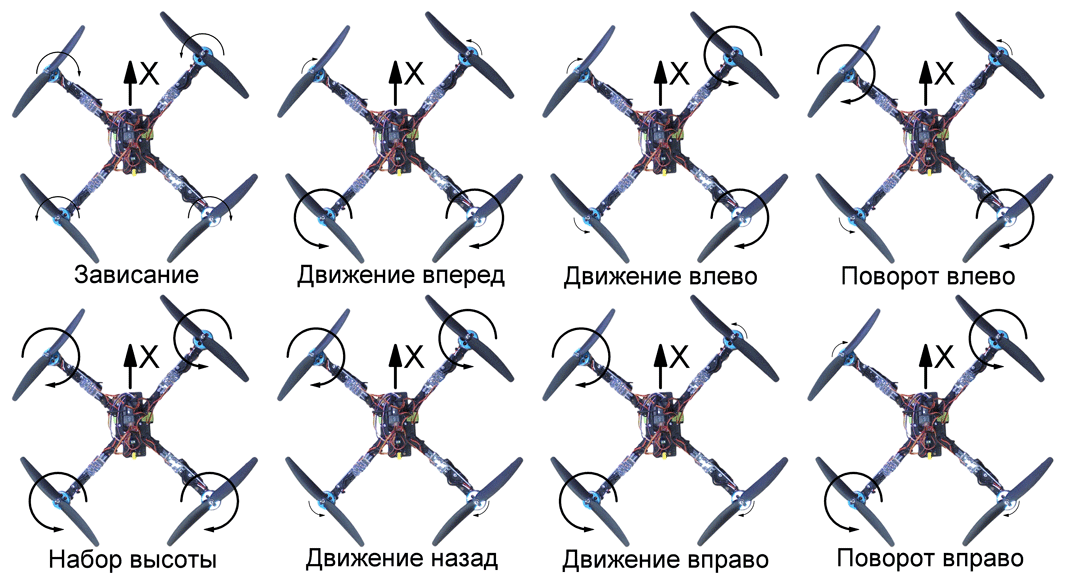
Рис. Скорость вращения моторов, в зависимости от команды пилота.
Пилот управляет не скоростью вращения каждого пропеллера, а газом и углами наклона квадрокоптера через полётный контроллер. Пилот задает направление, в котором желал бы двигаться, а полётный контроллер делает остальную работу.
Принцип функционирования полётного контроллера.
Полётный контроллер - устройство, обеспечивающее полёт квадрокоптера, за счет управления газом, углами крена, тангажа и рысканья (throttle, pitch, roll, yaw). Это своеобразные "мозги" мультикоптера. Обычно он содержит несколько датчиков (гироскопы, акселерометр, магнитометр, GPS датчик) и микроконтроллер, который производит расчеты. Именно полётный контроллер отвечает за то, чтобы при среднем положении всех стиков джойстика квадрокоптер стабилизировался, висел в воздухе не отклоняясь ни в одну из сторон.

Полётный контроллер несколько десятков раз в секунду выполняет цикл управления в который входит: считывание показаний датчиков, считывание каналов управления, обработка информации и выдача управляющих сигналов моторам, чтобы выполнять команды пилота.
Полётный контроллер выполняет следующие задачи:
Собирает информацию с датчиков (встроенные, либо внешние: гироскопы, акселерометры, GPS, магнитометр);
Рассчитывает свое положение в пространстве, по показаниям датчиков;
Собирает информацию о внешних воздействиях, таких как отклонения стиков пилотом, алгоритм программы;
Вносит корректировку с помощью коэффициентов ПИД (Пропорционально-Интегрально-Дифференциальные);
Отправляет управляющие сигналы на регуляторы оборотов (ESC).
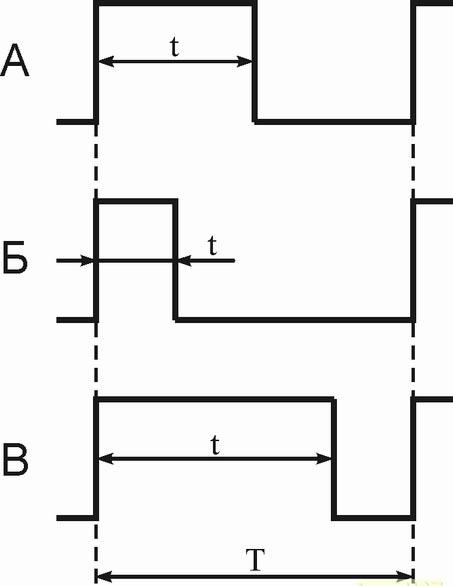
Полётный контроллер выдает ШИМ-импульсы (PWM) на регуляторы оборотов (ESC), в зависимости от команды стика джойстика, либо программы. Например, чтобы дать команду мотору вращаться с максимальной скоростью контроллер должен отправлять импульсы длительностью 2 миллисекунды, перемежающиеся логическим нулем длительностью 10 — 20 миллисекунд. Длительности импульса в 1 миллисекунду соответствует остановка мотора, 1.1 мс — 10% от максимальной скорости, 1.2 мс — 20% и т.п. Длительность нуля не играет никакой роли, важна только длительность самого импульса.
Но все не так просто, полетные контроллеры бывают разные с разными настройками, регуляторы бывают разные, минимум (1 мс) и максимум (2 мс) — не универсальны. В зависимости от множества факторов диапазон 1-2 мс может на деле оказаться 1.1 — 1.9 мс, либо другим. Чтобы регулятор и контроллер говорили абсолютно на одном языке существует процедура калибровки регуляторов.
ПИД-регуляторы.
При работе с мультикоптерами, вам придется столкнуться с настройкой ПИД-регулятора, этот математический аппарат применяется почти во всех задачах стабилизации: стабилизация углов квадрокоптера в воздухе, полет и удержание позиции по GPS, удержание высоты по альтиметру.
Вы собираете мультикоптер, калибруете датчики, регуляторы, радио, все проверяете, пытаетесь взлететь, а его переворачивает даже легким ветерком. Или наоборот: он такой резкий, что внезапно срывается с места и крутит тройное сальто без разрешения. Причина все та же: параметры ПИД-регуляторов.
Для многих устройств, использующих ПИД-регуляторы, существуют инструкции по настройке. Но чтобы легче ориентироваться в этом многообразии полезно понимать, как же внутри устроены эти регуляторы. Предлагаю вместе со мной самим заново «изобрести» и «на пальцах» понять формулу ПИД-регулятора. Будем рассматривать квадрокоптер в двумерном пространстве, где у него есть только один угол — угол крена, и два мотора: левый и правый.

В полетный контроллер непрерывно поступают команды с земли: «крен 30 градусов», «крен -10 градусов», «крен 0 градусов (держать горизонт)»; его задача — как можно быстрее и точнее их выполнять с помощью моторов с учетом: ветра, неравномерного распределения веса квадрокоптера, неравномерного износа моторов, инерции квадрокоптера и т.п. Таким образом, полетный контроллер должен непрерывно решать задачу, какую скорость вращения подавать на каждый мотор с учетом текущего значения угла крена и требуемого
Уровень газа поступает из приемника в контроллер. Обозначим его throttle. Если left и right — скорости вращения левого и правого моторов, то:
left = throttle + force, right = throttle - force,
где force — реакция квадрокоптера (усилие), которое создает момент вращения за счет того, что левый мотор вращается на force быстрее, чем газ, а правый — на столько же медленнее. force может принимать и отрицательные значения, тогда правый мотор закрутится быстрее. Если мы научимся вычислять эту величину на каждой итерации цикла обработки, значит мы сможем управлять квадрокоптером. Понятно, что force как минимум должно зависеть от текущего угла крена (roll) и желаемого угла крена (tar get_roll), который поступает с пульта управления.
Представим ситуацию: поступает команда «держать горизонт» (tar get_roll = 0), а квадрокоптер имеет крен влево:
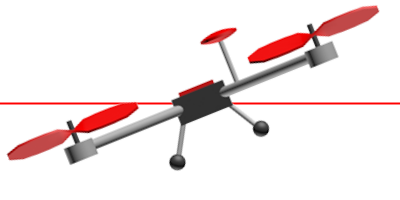
Рис. Двухмерный квадрокоптер с креном влево. error — разность (ошибка) между tar get_roll и roll, которую контроллер стремится минимизировать.
Чем больше разность между желаемым углом крена и текущим, тем сильнее должна быть реакция, тем быстрее левый мотор должен закрутиться относительно правого. Если это записать с использованием наших обозначений:
force = P error*
P — коэффициент пропорциональности. Чем он больше, тем сильнее будет реакция, тем резче квадрокоптер будет реагировать на отклонение от требуемого угла крена. Эта интуитивно понятная и простая формула описывает работу пропорционального регулятора. Чем сильнее квадрокоптер отклонился от требуемого положения, тем сильнее надо пытаться его вернуть. К сожалению, эту формулу придется усложнить. Главная причина — перерегулирование.
За несколько десятков миллисекунд (несколько итераций цикла обработки) под воздействием пропорционального регулятора квадрокоптер вернется в требуемое (в данном случае горизонтальное) положение. Все это время ошибка error и усилие force будут иметь один и тот же знак, хоть и становиться все меньше по модулю. Набрав какую-то скорость поворота (угловую скорость) квадрокоптер просто перевалится на другой бок, ведь никто его не остановит в требуемом положении. Все равно что пружина, которая всегда стремится вернуться в начальное положение, но если ее оттянуть и отпустить — будет колебаться, пока трение не возьмет верх.
По этой причине в пропорциональный регулятор нужно добавить еще одно слагаемое, которое будет тормозить вращение квадрокоптера и препятствовать перерегулированию (переваливанию в противоположную сторону) —имитация трения в вязкой среде: чем быстрее поворачивается квадрокоптер, тем сильнее надо пытаться его остановить, конечно, в разумных пределах. Скорость вращения (скорость изменения ошибки ) обозначим как spin, тогда:
force = P error + D spin
D — настраиваемый коэффициент: чем он больше, тем сильнее останавливающее усилие.
Скорость изменения любой величины — производная этой величины по времени:
И вот пропорциональный регулятор превращается в пропорционально-дифференциальный (пропорциональное слагаемое и дифференциальное):

Ошибку error вычислить легко, ведь на каждой итерации мы знаем roll и tar get_roll; P и D — настраиваемые перед запуском параметры. Для вычисления производной (скорости изменения error) необходимо хранить предыдущее значение error, знать текущее значение error и знать время, которое прошло между измерениями (период регулирования). И вот она — физика шестого класса школы (скорость = расстояние / время):

dt — период регулирования; error previous — значение ошибки с предыдущей итерации цикла регуляции. Кстати, эта формула — простейший способ численного дифференцирования, и он нам здесь вполне подойдет.
Теперь у нас есть пропорционально-дифференциальный регулятор в плоском «бикоптере», но осталась еще одна проблема. Пусть левый край будет весить чуть больше правого, или, что то же самое, левый мотор работает чуть хуже правого. Квадрокоптер чуть наклонен влево и не поворачивается обратно: дифференциальное слагаемое равно нулю, а пропорциональное слагаемое хоть и принимает положительное значение, но его не хватает, чтобы вернуть квадрокоптер в горизонтальное положение, ведь левый край весит чуть больше правого. Как следствие — квадрокоптер будет все время тянуть влево.
Необходим механизм, который бы отслеживал такие отклонения и исправлял их. Характерной особенностью таких ошибок является то, что они прявляют себя со временем. На помощь приходит интегральное слагаемое. Оно хранит сумму всех ошибкок error по всем итерациям цикла обработки. Как же это поможет? Если пропорционального слагаемого не достаточно, чтобы исправить маленькую ошибку, но она все равно есть — постепенно, со временем, набирает силы интегральное слагаемое, увеличивая реакцию force и квадрокоптер принимает требуемый угол крена.
Тут есть нюанс. Предположим error равна 1 градусу, цикл регулирования — 0.1с. Тогда за одну секунду сумма ошибок примет значение 10 градусов. А если цикл обработки — 0.01с, то сумма наберет аж 100 градусов. Чтобы за одно и тоже время интегральное слагаемое набирало одно и тоже значение при разных периодах регулирования, полученную сумму будем умножать на сам период регулирования. Легко посчитать, что в обоих случаях из примера получается сумма в 1 градус. Вот оно — интегральное слагаемое (пока без настраиваемого коэффициента):

Эта формула — не что иное, как численный интеграл по времени функции error в интервале от нуля до текущего момента. Именно поэтому слагаемое называется интегральным:
где T — текущий момент времени.
Пришло время записать окончательную формулу пропорционально-интергрально-дифференциального регулятора:

где I — один из настраиваемых параметров, которых теперь трое: P,I,D. ПИД регуляторы - важная часть полётного контроллера, без их использования квадрокоптер летал бы непредсказуемо. Они настраиваются индивидуально для каждого квадрокоптера.
Контрольные вопросы:
1) По какому принципу работает полётный контроллер? 2) Перечислите основные задачи полётного контроллера. 3) Сформулируйте принцип работы ПИД-регулятора.